MAIN PAGE
> Back to contents
Security Issues
Reference:
Il'in V.V., Nikolaev N.V., Nekrasov M.I., Sokolov A.M.
An Approach to Evaluating the Effectiveness of Systems for Countering Robotic Complexes at Important Facilities
// Security Issues.
2023. № 4.
P. 15-26.
DOI: 10.25136/2409-7543.2023.4.39479 EDN: WKOLMA URL: https://en.nbpublish.com/library_read_article.php?id=39479
An Approach to Evaluating the Effectiveness of Systems for Countering Robotic Complexes at Important Facilities
Il'in Vladimir Viktorovich
PhD in Technical Science
Staff member, Russian Federation Security Guard Service Federal Academy
302015, Russia, Orlovskaya oblast', g. Orel, ul. Priborostroitel'naya, 35

|
w.ilin82@yandex.ru
|
|
 |
Other publications by this author
|
|
Nikolaev Nikolay Vladimirovich
PhD in Economics
Staff member, Russian Federation Security Guard Service Federal Academy
302015, Russia, Orlovskaya oblast', g. Orel, ul. Priborostroitel'naya, 35
|
|
nnv85nikolas@mail.ru
|
|
|
Other publications by this author
|
|
Nekrasov Maksim Igorevich
Staff member, Russian Federation Security Guard Service Federal Academy
302015, Russia, Orel region, Orel, Priborostroitelnaya str., 35
|
|
nekr-maks@yandex.ru
|
|
|
Other publications by this author
|
|
|
Sokolov Artem Maksimovich
Staff member, Russian Federation Security Guard Service Federal Academy
302015, Russia, Orlovskaya oblast', g. Orel, ul. Priborostroitel'naya, 35
|
|
sokol.sam@gmail.com
|
|
|
Other publications by this author
|
|
|
DOI: 10.25136/2409-7543.2023.4.39479
EDN: WKOLMA
Received:
22-12-2022
Published:
16-10-2023
Abstract:
The subject of the study is a scientific and methodological apparatus for evaluating the effectiveness of systems for countering robotic complexes. The object of research is a scientific and methodological apparatus for analyzing systems for countering robotic complexes at important facilities. The aim of the work is to develop a scientific and methodological apparatus for evaluating the effectiveness of systems for countering robotic complexes at important facilities in the direction of taking into account their structure, spatial configuration, as well as the synergetic effect of the joint use of heterogeneous technical means as part of the system. In order to achieve the research goal, the general logical-probabilistic modeling method and the tools of modern geoinformation systems are comprehensively applied in the work. The article proposes a new approach to evaluating the effectiveness of spatially distributed multi-bridge systems for countering robotic complexes. The results obtained can be used by interested organizations to evaluate the effectiveness of variants of such systems and identify their vulnerabilities. The scientific novelty consists in the development of an approach to assessing the effectiveness of spatially distributed multi-border systems for countering robotic complexes, taking into account their structure, spatial configuration, as well as the synergetic effect of the joint use of heterogeneous technical means of countering robotic complexes through the integrated use of new logical-probabilistic models and modern geoinformation technologies. The results obtained in the article indicate that the goal of the work has been achieved.
Keywords:
Robotic complexes, countering robotic complexes, protection of important sites, security systems, modeling of security systems, physical protection systems, performance indicator, modeling of protection systems, the model of the counteraction system, logical-probabilistic method
This article is automatically translated.
You can find original text of the article here.
Introduction Modern robotic complexes (RTCs) are characterized by versatility, autonomy and relative ease of use, and also have the possibility of both single and group use [1-3]. In this regard, violators are increasingly choosing RTK as a means to carry out sabotage and terrorist acts at important facilities. To ensure the protection of objects from this type of threats, multi-border RTK counteraction systems are used as part of physical protection systems, consisting of heterogeneous technical means operating on the basis of various physical principles [4]. These products are characterized by unique features, and also have certain advantages and disadvantages. Evaluation of the effectiveness of the functioning of anti-RTK systems is an urgent and complex scientific and technical task that requires a comprehensive account of the influence of various factors and a multi-criteria quantitative assessment of the solutions being formed. To this end, deterministic approaches are currently being applied, full-scale tests are being conducted, computational and expert methods are being used [5]. The analysis showed that the existing methods do not allow to fully take into account the influence of the topographic features of the protected object and the synergetic effect of the complex application of heterogeneous technical means of countering RTK as part of spatially distributed multi-border systems. This is due to the fact that solving the problem taking into account these factors requires significant time and material resources, as well as a large amount of empirical data, which in practice is not always possible to obtain [5, 6]. Thus, there is an objective contradiction between the need to assess the effectiveness of spatially distributed multi-border RTK counteraction systems at important facilities and the inability of existing scientific and methodological approaches to provide a comprehensive account of the main influencing factors. In order to resolve this contradiction, it is proposed to develop a new approach to evaluating the effectiveness of the systems under study, which provides: – to take into account the topographic features of the object – performing spatial modeling of the RTK counteraction system by displaying the structure of its boundaries and constructing sectors of the means in their composition, taking into account the parameters of placement on the ground, the presence of artificial and natural obstacles and the topology of the protected area; – to assess the effectiveness of the system functioning – the implementation of probabilistic modeling, which takes into account the results of spatial modeling and the synergetic effect caused by the use of heterogeneous technical means in the system. In this article, we will consider the approach to solving this problem in more detail. Evaluation of the effectiveness of the RTK counteraction system using the general logical-probabilistic modeling method and modern geoinformation technologies To take into account the topographic features of the protected object, the presence of artificial and natural obstacles, the parameters of the placement of anti-RTK means on the ground, in this paper it is proposed to use the tools of modern geoinformation systems (GIS), which will allow to build a model of the coverage area of the anti-RTK system [7]. The main purpose of the functioning of the RTK counteraction system at an important facility is to prevent a sabotage and terrorist act by identifying and neutralizing potentially dangerous RTKs. As shown in the monograph [8], with such a formulation of the problem, it is advisable to use the probability of suppressing the illegal use of RTK as an indicator of the effectiveness of the anti-RTK system. To assess the value of the probability of suppressing the illegal use of RTK, a general logical-probabilistic modeling method (OLVM) was chosen in the work, which has proven itself well in solving problems of analysis and synthesis of systems that provide for the possibility of describing a sequence of binary events. It is based on the application of the Boolean algebra apparatus to formalize the relationships between elementary events and the conditions of their occurrence during the functioning of the RTK counteraction system. It should also be noted that currently there are certified OLVM automation tools [9]. The main disadvantage of OLVM is the significant complexity of taking into account the time parameters of the occurrence of elementary events. However, temporary factors can be taken into account when setting requirements for the deployment of RTK countermeasures on the ground. Namely, the configuration on the ground of their sectors of action should be such that the time spent by the RTK within their limits when the threat to the object is realized is sufficient for the means to perform their functions. The general sequence of OLVM application has the following form [9]: 1) construction of a logical-probabilistic model of the functioning of the RTK counteraction system in the form of a graph that reflects the initiating, intermediate and final events, as well as the relationships between them. Initiating events characterize the impact of violators on the system. Intermediate events are obtained by a logical combination of two or more events. The final event describes a certain dangerous state of the system or, conversely, the suppression of illegal actions. Moreover, the probability of occurrence of events related to the functioning of individual means as part of the RTK counteraction system can be obtained during tests; 2) drawing up a logical function describing the functioning of the anti-RTK system; 3) formation of a probabilistic function based on a logical; 4) evaluation of the RTK counteraction system based on a probabilistic function. Thus, the joint use of OLVM and GIS will allow us to build a comprehensive model of the RTK counteraction system to assess its effectiveness, taking into account the synergetic effect of the joint use of heterogeneous technical means of countering RTK, as well as the configuration parameters of a multi-border, space-distributed RTK counteraction system. Let's consider the procedure for evaluating the effectiveness of the RTK counteraction system in accordance with the proposed approach. Its general appearance is shown in Figure 1.
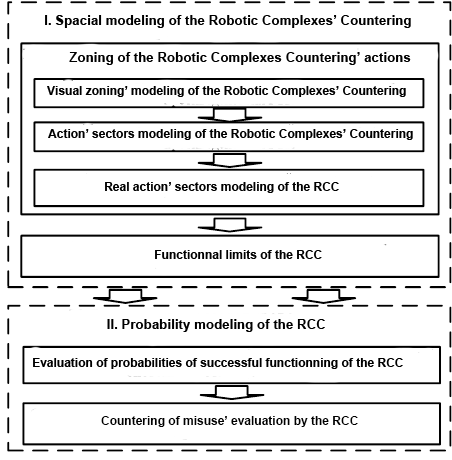
Figure 1 – Procedure for evaluating the effectiveness of the anti-RTK system The initial data for evaluating the effectiveness of the system are: 1) geographical information about the protected object in the form of a digital map of the area; 2) list of frontiers of the RTK counteraction system; 3) the list of anti-RTK means as part of the boundaries of the system; 4) characteristics of anti-RTK means: – the probability of successful operation under standard conditions; – spatial characteristics of the sector of action of the means; – the lifting height of the sensor/impact generator above the earth's surface. 5) parameters of the placement of RTK countermeasures (geographical coordinates of installation sites and orientation angles of directional diagrams); 6) a list of scenarios for the implementation of security threats, which reflects the possible ways of using the RTK of violators, as well as the unmasking signs and vulnerabilities characteristic of them. Spatial modeling of the RTK counteraction system is carried out sequentially for each boundary. The first step of spatial modeling involves the construction of the sectors of the action  of anti-RTK means as part of the j-th boundary of the system by: of anti-RTK means as part of the j-th boundary of the system by: 1) estimates of visibility zones  for the points of placement of RTK countermeasures for the points of placement of RTK countermeasures , taking into account the lifting heights of antenna-mast devices , taking into account the lifting heights of antenna-mast devices ; ; 2) construction from the calculated sectors of the action of the RTK countermeasures in accordance with the expression (1): where  is the azimuth in the direction of the main maximum of the directional pattern of the vehicle; is the azimuth in the direction of the main maximum of the directional pattern of the vehicle;  – the width of the action of the tool in the horizontal plane; – the width of the action of the tool in the horizontal plane;
( ) – coordinates of the vehicle placement point; ) – coordinates of the vehicle placement point; L is the maximum range of the vehicle. 3) determining the boundaries of the real sectors of the RTK counteraction means using the overlay operation of the intersection of the visibility zone and the calculated sector of the corresponding means is carried out according to the expression (2): |  , ,
| (2) | where ( , ,  ) are the geographical coordinates of the placement of the i–th means of countering the RTK as part of the j-th frontier; ) are the geographical coordinates of the placement of the i–th means of countering the RTK as part of the j-th frontier;  – the height of the installation (of the mast device, if available) of the i-th means of countering the RTK as part of the j-th frontier; – the height of the installation (of the mast device, if available) of the i-th means of countering the RTK as part of the j-th frontier;
 – the area of visibility from a point with geographical coordinates (, ) at an observation height corresponding to the elevation of the antenna – the area of visibility from a point with geographical coordinates (, ) at an observation height corresponding to the elevation of the antenna ; ;
 – azimuth of the maximum of the directional pattern of the i-th RTK counteraction means as part of the j-th boundary; – azimuth of the maximum of the directional pattern of the i-th RTK counteraction means as part of the j-th boundary;
 – the angle of the maximum position of the radiation pattern of the i-th RTK counteraction device as part of the j-th boundary; – the angle of the maximum position of the radiation pattern of the i-th RTK counteraction device as part of the j-th boundary;
 – the calculated sector of the action of the i-th RTK counteraction device as part of the j-th boundary when it is placed at a point with geographical coordinates (, ) and the orientation of the maximum of the radiation pattern at angles – the calculated sector of the action of the i-th RTK counteraction device as part of the j-th boundary when it is placed at a point with geographical coordinates (, ) and the orientation of the maximum of the radiation pattern at angles  and and  . .
At the second step, the formation of a spatial model  of the j-th boundary of the RTK counteraction system is carried out. For this purpose, an overlay operation is performed to combine the real sectors of the action of all means of countering the RTK of this boundary, expression (3): of the j-th boundary of the RTK counteraction system is carried out. For this purpose, an overlay operation is performed to combine the real sectors of the action of all means of countering the RTK of this boundary, expression (3): |  . .
| (3) | It should be noted that a digital terrain map in GIS is represented as a set of elementary objects [7]. The probabilistic stage involves the construction of analytical expressions that allow us to estimate the probability of successful functioning of a separate boundary or the system as a whole for a given point in space. The following assumptions are used: 1. Probability of detection (counteraction) The RTK within the sector of action of the means is constant and is determined in its TTX. 2. Outside the sector of action, the probability of detection (counteraction) The RTK by the means is zero. The first step of the modeling stage under consideration is an assessment of the spatial distribution of the probability of successful functioning of the j–th frontier of the RTK counteraction system. The fact of the successful functioning of the frontier is understood as the successful functioning of at least one means of countering the RTK from its composition, the sector of action of which overlaps the considered point of space. In this regard, the functioning of the boundary can be described by a conditional scheme with a parallel connection of elements [10]. Then the expression (4) can be used to estimate the probability of the successful functioning of the boundary at a given point: |  , ,
| (4) | where  is the probability of successful functioning of the j–th functional boundary of the RTK counteraction system at a point with geographical coordinates is the probability of successful functioning of the j–th functional boundary of the RTK counteraction system at a point with geographical coordinates  at an altitude h from the earth's surface; at an altitude h from the earth's surface;  – the investigated element of space; – the investigated element of space;
 – the probability of successful functioning of the i-th means of countering the RTK as part of the j-th functional boundary. – the probability of successful functioning of the i-th means of countering the RTK as part of the j-th functional boundary.
The second step of probabilistic modeling involves assessing the probability of successful functioning of the boundaries of the RTK counteraction system in accordance with the expression (5): | 
| (5) | where  is the probability of successful functioning of the j–th frontier of the RTK counteraction system; is the probability of successful functioning of the j–th frontier of the RTK counteraction system;  – spatial model of the j-th frontier of the RTK counteraction system; – spatial model of the j-th frontier of the RTK counteraction system;
 – the investigated element of space. – the investigated element of space.
The permissibility of using additive convolution is determined by the fact that: – all values are homogeneous; – the hit of the RTK at a point in space is a random value; – the probability of successful operation of the boundary at each point is within acceptable limits; – a decrease in the probability of successful functioning of the boundary at one point can be compensated by an increase in the probability of successful functioning at another point [11]. At the third step, the probability of successful functioning of the RTK counteraction system as a whole is estimated by the OLVM method by performing the following operations [9]: 1. Determination of the set of events characterizing the functioning of the RTK counteraction system at the facility (6): |  , ,
| (6) | where G is a list of scenarios for the implementation of threats using RTK; R – list of functional boundaries of the RTK counteraction system at an important facility; D – a set of events characterizing the functioning of the RTK counteraction system at an important facility;  – a lot of events corresponding to possible scenarios of threat implementation; – a lot of events corresponding to possible scenarios of threat implementation;
 – a lot of events corresponding to the functioning of the boundaries of the RTK counteraction system. – a lot of events corresponding to the functioning of the boundaries of the RTK counteraction system.
It should be noted that these events have a binary nature, namely: – the boundary of the RTK counteraction system can either fulfill its function, or not fulfill it; – the threat implementation scenario is either used by the violator or not. At the same time, the probability of occurrence of events from the set  corresponds to the probability of successful functioning of the considered boundary of the system (7): corresponds to the probability of successful functioning of the considered boundary of the system (7): |  , ,
| (7) | where  is the probability of successful functioning of the RTK countermeasures of the j–th functional boundary of the system at an important facility; is the probability of successful functioning of the RTK countermeasures of the j–th functional boundary of the system at an important facility;  – the investigated point of space. – the investigated point of space.
Since the events from the set  that characterize the threat scenarios are considered incompatible, the probability of their occurrence is determined according to the expression (8): that characterize the threat scenarios are considered incompatible, the probability of their occurrence is determined according to the expression (8): | 
| (8) | 2. Construction of analytical expressions characterizing the dependence of the probability of suppression of the illegal use of RTK on the probabilities of the occurrence of binary events. For this purpose, functional integrity schemes (SPCs) are formed, describing the process of functioning of a multi-border RTK counteraction system under various scenarios of threat implementation [9]. The general view of such SPCs is shown in Figure 2. The relationships between events are determined taking into account the unmasking features and vulnerabilities of various ways of using RTK, corresponding to possible scenarios of threat implementation. 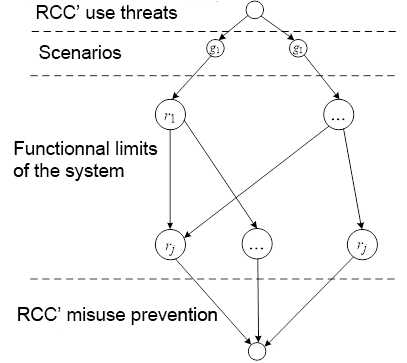
Figure 2 – SPC of the functioning of the RTK counteraction system at important facilities Based on the SPC, with the help of automated modeling tools (for example, "Arbiter"), functions are built to assess the likelihood of suppressing the illegal use of RTK in possible scenarios of threat implementation [9]. They have a polynomial form and can be written as follows (9):
| 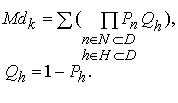
| (9) | 3. Evaluation of the spatial distribution of the probability of successful functioning of the RTK counteraction system. To do this, the values obtained for each of the boundaries of the system using expression (4) are substituted into expression (9) (Figure 3). 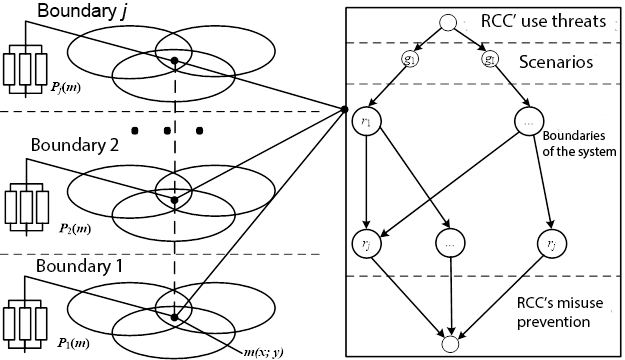
Figure 3 – Estimation of the spatial distribution of the probability of successful functioning of the RTK counteraction system Thus, the approach presented in the paper makes it possible to evaluate the effectiveness of a spatially distributed multi-border anti-RTK system, taking into account its structure, spatial configuration, as well as the synergetic effect of the joint use of heterogeneous technical means of countering RTK as part of the boundaries of the system. The results obtained in the article are of significant importance for organizations that ensure the protection of important objects, and allow: – to assess the compliance of individual boundaries or the RTK counteraction system at a given facility with the requirements in terms of the probability of successful operation; – to identify vulnerabilities of the RTK counteraction system to possible ways of using RTK and the most threatening directions; – to substantiate technical solutions for the construction and development of anti-RTK systems at important facilities.
References
1. Unmanned aerial vehicles for military purposes. (2019). V.A. Aladinskii, S.V. Bogdanovskii, V.M. Klimenko, V.A. Romashov (Eds.). – Cherepovec RIO VVIURE.
2. Teams of intelligent robots. Areas of application. (2018). Ed. V.I. Siryamkina. Tomsk STT.
3. Babich, L.A., & Islamov, V.K. (2019). Group application of reconnaissance and strike unmanned aerial vehicles. Young scientist. International Scientific Journal, 45(283), 3–6.
4. Egurnov, V.O., Ilin, V.V., Nekrasov, M.I., & Sosunov, V.G. (2018). Analysis of ways to counter unmanned aerial vehicles to ensure the safety of protected objects. Questions of defense technology. Scientific and technical journal. Series 16. Technical means of countering terrorism, 115.
5. Kostin, V.N. (2021). Methods, models and methods of substantiation and development of systems of physical protection of critical objects (dissertation) … Ph.D. 05.13.01 (protected 16.09.2021). Kostin Vladimir Nikolaevich. – Orenburg. – Bibliography, 222–237.
6. Panin, O. (2007). Problems of evaluating the effectiveness of the functioning of systems of physical protection of objects. Security. Reliability. Information, 3(72), 23–25.
7. Kovin R.V. (2008). Geoinformation systems: a textbook. R.V. Kovin_ N.G. Markov. – Tomsk. Tomsk Polytechnic University Publishing House.
8. Boyarincev, A.V., Zuev, A.G., & Nichikov, A.V. (2008). Problems of anti-terrorism: threats and models of violators. Saint-Petersburg, ZAO «NPP «ISTA_Sistems».
9. Application of the general logical-probabilistic method for the analysis of technical, military organizational and functional systems and armed confrontation : monograph. V.I. Polenin, I.A. Ryabinin, S.K. Svirin, I.A. Gladkova. Pod red. A.S. Mojaeva. Project within the framework of the Concept of the socio-political project of the Russian Academy of Sciences "Actual problems of social security". Russian Academy of Natural Sciences. St. Petersburg: St. Petersburg-Regional Branch of the Russian Academy of Medical Sciences.
10. Ventcel, E.S. (1998). Probability theory: textbook for universities. E.S. Ventcel. Moscow: High School.
11. Anfilatov, V.S. (2009). System analysis in management: studies stipend. V.S. Anfilatov, A.A. Emelyanov, A.A. Kukushkin. Moscow: Finance and Statistics.
Peer Review
Peer reviewers' evaluations remain confidential and are not disclosed to the public. Only external reviews, authorized for publication by the article's author(s), are made public. Typically, these final reviews are conducted after the manuscript's revision. Adhering to our double-blind review policy, the reviewer's identity is kept confidential.
The list of publisher reviewers can be found here.
The peer-reviewed study is devoted to the evaluation of multi-barrier systems for countering robotic complexes. The research methodology is based on considering the possibility of applying deterministic approaches, conducting field tests, using computational and expert methods and comparing them with the new author's approach to evaluating the effectiveness of the systems under study. The author associates the relevance of the work with the fact that evaluating the effectiveness of the functioning of systems for countering robotic complexes is a complex scientific and technical task that requires comprehensive consideration of the influence of various factors and a multi-criteria quantitative assessment of the solutions being formed. The scientific novelty of the reviewed study, according to the reviewer, consists in the development of an author's methodology for assessing the compliance of individual boundaries and counteraction systems with robotic complexes, the requirements for the probability of successful operation, identifying their vulnerability and substantiating technical solutions for the construction and development of anti-RTK systems at important facilities. The following sections are structurally highlighted in the article: Introduction, Evaluation of the effectiveness of the RTK counteraction system using the general logical-probabilistic modeling method and modern geoinformation technologies, Bibliography. The author formulates the goals of the functioning of the system of countering robotic complexes, outlines the disadvantages of using a general logical-probabilistic modeling method to solve the problem identified in the article. Next, the proposed procedure for evaluating the effectiveness of a system for countering robotic complexes is consistently described, accompanied by formalized support in the form of formulas, provides schemes for the functional integrity of the system's functioning and evaluating the spatial distribution of the probability of successful functioning of a system for countering robotic complexes at important facilities. To take into account the topographical features of the object, it is proposed to perform spatial modeling of the system of countering robotic complexes by displaying the structure of its boundaries and constructing sectors of the means in their composition, taking into account the parameters of location on the ground, the presence of artificial and natural obstacles and the topology of the protected area. And to assess the effectiveness of the system's functioning, probabilistic modeling is used, which takes into account the results of spatial modeling and the synergetic effect caused by the use of heterogeneous technical means in the system. The bibliographic list includes 11 sources – scientific and educational publications of domestic authors on the topic of the article, to which there are targeted links in the text confirming the existence of an appeal to opponents. The following points should be noted as comments. Firstly, the conclusions of the article are not designed into an independent section, without which the study looks incomplete, despite the presence of a meaningful final part of the work. It also seems appropriate to highlight and title several logical parts in the work. Secondly, after formula (9), the decoding of the symbols used in it is not given. The article corresponds to the direction of the journal "Security Issues", reflects the results of the research conducted by the authors, contains elements of scientific novelty and practical significance, may arouse interest among readers, and is recommended for publication after some revision in accordance with the comments made.
Link to this article
You can simply select and copy link from below text field.
|





