|
MAIN PAGE
> Back to contents
Cybernetics and programming
Reference:
Dobrynin A.S., Kulakov S.M., Purgina M.V., Koynov R.S.
On the use of graph models in automation systems for complex non-stationary process objects
// Cybernetics and programming.
2018. № 3.
P. 63-71.
DOI: 10.25136/2644-5522.2018.3.26400 URL: https://en.nbpublish.com/library_read_article.php?id=26400
On the use of graph models in automation systems for complex non-stationary process objects
Dobrynin Aleksey Sergeevich
Senior Lecturer, Department of Automation and Information Systems, Siberian State Industrial University
654007, Russia, Kemerovskaya oblast', g. Novokuznetsk, ul. Kirova, 42

|
serpentfly@mail.ru
|
|
 |
Other publications by this author
|
|
Kulakov Stanislav Matveevich
Doctor of Technical Science
Professor, Department of Automation and Information Systems, Siberian State Industrial University
654007, Russia, Kemerovskaya oblast', g. Novokuznetse, ul. Kirova, 42
|
|
kulakov-ais@mail.ru
|
|
 |
Other publications by this author
|
|
Purgina Marina Vladimirovna
PhD in Technical Science
Associate Professor, Department of Information Security, Novosibirsk State University of Economics and Management
654041, Russia, Kemerovskaya oblast', g. Novokuznetsk, ul. Kirova, 42
|
|
pur-11@yandex.ru
|
|
|
Other publications by this author
|
|
|
Koynov Roman Sergeevich
Leading Specialist for Informatization, Siberian State Industrial University
654041, Russia, Kemerovskaya oblast', g. Novokuznetsk, ul. Kirova, 42
|
|
koynov_rs@mail.ru
|
|
 |
Other publications by this author
|
|
|
DOI: 10.25136/2644-5522.2018.3.26400
Received:
25-05-2018
Published:
22-06-2018
Abstract:
Managing complex non-stationary systems is a non-trivial task. One of the conditions for effective control is the need to change and adjust the control algorithms under the changing operating conditions of automated systems. The article deals with the construction of control devices based on models of graph theory. As an object of research, approaches and methods of managing complex non-stationary systems are used. An approach based on the domain classification of the factors affecting the control object is considered. Management is considered with significant changes in environmental factors. As simulation methods, simulation and computer modeling were used, which allowed to evaluate the effectiveness of the proposed approaches and management methods. Also, methods of system analysis and modern algorithms on graphs were applied. The presented approach allows to take into account the changing behavior of the non-stationary control object when it is known that certain parameters and factors of the environment can influence this control. The mechanism of the finite state machine allows automatic switching of control algorithms depending on the situation. Studies have shown the expediency of using the proposed approach for the management of complex non-stationary automation systems.
Keywords:
graph, model, non-stationary objects, automation, finite automata, theory of automatic control, control system, control object, control device, control algorithm
This article written in Russian. You can find original text of the article here
.
Введение
Элементы теории конечных автоматов получили распространение в технических системах. В процессе эволюции систем робототехники в последние годы используется описание таких систем на множестве отдельных состояний (states) и переходов между ними (transitions). По аналогии с робототехническими комплексами, технический объект управления (и устройство управления) может изменять свои состояния. Чаще всего это происходит при существенном изменении параметров внешней среды, входов системы, смены погодных условий, климата. Общеизвестно, что достаточно сложные технические системы ограниченно функционируют в условиях резкого изменения параметров внешней среды.
Теория автоматического управления и отдельные разделы кибернетики, посвященные автоматизированным системам, описывают и учитывают известные факты о том, что характер и структура внешних возмущений относительно постоянных на интервале  , могут плавно или резко измениться на другом интервале времени. При этом недостаточное внимание уделяется вопросам создания унифицированных подходов к синтезу управляющих устройств, функционирующих в условиях нестационарных автоматизированных объектов управления. Немаловажное значение также имеют вопросы технической реализации устройств управления. , могут плавно или резко измениться на другом интервале времени. При этом недостаточное внимание уделяется вопросам создания унифицированных подходов к синтезу управляющих устройств, функционирующих в условиях нестационарных автоматизированных объектов управления. Немаловажное значение также имеют вопросы технической реализации устройств управления.
Рассмотрим основные причины, по которым правила (алгоритмы) могут (и должны) изменяться:
1) изменение целей управления и ограничений;
2) изменение структуры и характеристик технологического объекта управления в процессе эксплуатации;
3) старение, износ и частичное разрушение технологических узлов объекта управления;
4) модернизация, реконструкция и ремонт технологического объекта управления;
5) изменения состава и качества перерабатываемых технологическим объектом материалов;
6) изменение свойств сигналов измерительной информации и данных, формируемых людьми.
В таких условиях алгоритм управления должен переключаться, подстраиваясь под изменяющиеся условия функционирования объекта, если имеются сведения или прогнозы, когда эти изменения происходят. Авторы являются сторонниками эволюционного подхода, основанного на дополнительном изучении объекта в процессе эксплуатации (или модернизации). На первоначальном этапе могут использоваться алгоритмы и настроечные параметры устройств управления, полученные известными методами (например, на основе идентификации объекта управления).
Статья рассматривает подход к управлению нестационарными объектами, который основывается на элементах теории графов (граф конечного автомата) и эволюционном подходе. Теория графов отлично зарекомендовала себя в ИТ-индустрии в целом, является хорошим инструментом для моделирования и описания систем различной природы, в том числе, систем, состояния в которых могут изменяться ситуационно. Предложенные в статье решения могут использоваться при создании аппаратно-программных устройств управления (программируемых контроллеров, PLC) с переключением алгоритмов управления, зависящих от ситуации.
Примеры сложных нестационарных технологических объектов
Изучение реальной жизни показывают, что любые технические системы с течением времени усложняются, становятся все более изощренными. В таких системах управление может изменяться при возникновении новой, нестандартной ситуации. Можно с уверенностью утверждать, что одного алгоритма недостаточно, для управления сложной системой – необходимы библиотеки алгоритмов, когда в зависимости от ситуации происходит выбор определенного решения.
Примеры сложных нестационарных технологических объектов (СНТО):
1) доменная печь (управление «сверху» путем изменения рудной нагрузки, схем шихтоподачи);
2) Кислородно-конвертерное производство;
3) агломерационная машина (управление скоростью движения аглоленты, температурой горна);
4) колонна синтеза аммиака;
5) летательный аппарат с изменяемой траекторией полета (например, при входе в зону радиолокации).
Формализм конечного автомата для устройств управления
Подходы к созданию изменяющихся систем управления известны. Это оригинальные разработки в области помехозащищенных систем [1], систем с переменной структурой [2], систем со структурной неопределенностью [3,4], адаптивных систем [5,6]. Тем не менее, в большинстве публикаций не уделяется достаточно внимания вопросам построения унифицированных схем управления нестационарными [7,8] автоматизированными объектами управления (коих большинство в реальном мире). Ряд публикаций рассматривает отдельные частные случаи нестационарности и прикладные решения, ограниченные узкими рамками. Совместное использование методик из смежных научных отраслей в конечном итоге позволяет создавать лучшие в своем классе системы. Одним из основных способов описания робототехнических систем в унифицированном языке моделирования (версии библиотек UML v1.0, UML v2.0) [9] является диаграмма (граф) конечного автомата (State Machine) [10]. Этот формализм доказал эффективность и качество полученных решений на многочисленных проектах последних лет. Диаграмма конечного автомата описывает управляемое программой прохождение некоторых стадий функционирования технической системы, при наступлении определенных событий (event) или срабатывании некоторых триггеров (trigger driven model). Она достаточно легко аппаратно и программно реализуется, что позволяет в итоге снизить затраты на выпуск серийной продукции.
Классическая ТАУ предполагает, что отдельные каналы управления можно описать дифференциальными уравнениями [11], при этом модель объекта неизменна в течение длительного временного периода. Этот подход не работает на сложных реальных системах. Объект постоянно изменяется, что доказывает практика. Таким образом, в большинстве систем управление ограничено и неэффективно. Авторы предлагают концепцию ситуационно изменяемого устройства управления, для нестационарных систем с использованием прикладного инструментария теории графов и известного формализма конечного автомата [12] (UML 1.0, UML 2.0). Важнейшим элементом предлагаемой концепции является возможность (и простота) ее аппаратно-программной реализации. В основу работы управляющего устройства закладывается модификация известного, широко-применяемого в области операционных систем алгоритма Round Robin [13,14], который применяется для планирования задач в операционных системах с вытесняющей многозадачностью. Предлагается модификация алгоритма Round Robin с использованием нескольких колец обхода конечного автомата, что не выделяется явно в классическом алгоритме. Конечный автомат состоит из нескольких уровней колец, где внутренние кольца описывают факторы, существенно влияющие на нестационарность (климат, качество сырья и т.д.), внешние кольца соответствуют менее существенным факторам. Следует отметить, что факторы, влияющие на стационарность, отличаются друг от друга в разных системах, для одних систем это может быть – качество сырья, для других – температура окружающей среды, для третьих – все вместе.
Рассмотрим эффективный, широко-используемый в ИТ, доменный принцип классификации. Каждый домен представляет собой отдельное кольцо конечного автомата (внутреннее, внешнее), где разделение доменов осуществляется по принципу «существенности». Большинство отдельных состояний может относиться к единственной, укрупненной группе факторов, куда входит:
1) История. Данные о функционировании системы, прецеденты и время. Вектор  . .
2) Материальные и информационные потоки  . Целесообразно выделение укрупненных групп по качеству потоков, допустим: “плохое”, “хорошее”, “отличное”. . Целесообразно выделение укрупненных групп по качеству потоков, допустим: “плохое”, “хорошее”, “отличное”.
3) Внешние воздействия, контролируемые  и неконтролируемые и неконтролируемые  . Целесообразно здесь также иметь в виду климатические и природные условия, изменяющиеся времена года. . Целесообразно здесь также иметь в виду климатические и природные условия, изменяющиеся времена года.
Единственную и существенную важность, представляет единая и общая схема унификации работы управляющего устройства, которая должна поддерживать использование различных сценариев управления в одном устройстве. Такая схема должна быть с одной стороны гибкой, позволяющей учитывать гибридные сценарии управления, с другой – простой, позволяющей различным коммерческим фирмам реализовывать готовые прикладные решения, с минимальной стоимостью.
Рассмотрим конечный автомат устройства управления для сценария, когда существенное влияние на нестационарность объекта управления оказывает климат. Другие факторы при этом отсутствуют. Такое предположение может быть логичным и справедливым для многих физических систем, характеристики которых существенно изменяются при изменении климатических условий (ветер, влажность, дождь, землетрясение). Необходимо отметить, что на большинство реальных систем кроме климатических также воздействует комплекс других факторов.
Допустим, необходимо использовать различающееся управление, для разных времен года (зима, лето, осень, весна), пример конечного автомата (внутреннее кольцо) показано на рисунке 1.
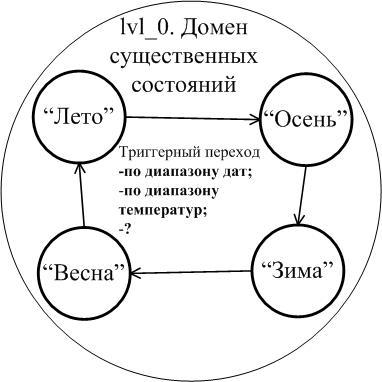
Рисунок 1 – Простейший конечный автомат одного фактора нестационарности
Представим, что требуется использовать различающееся управление для двухфакторного сценария, когда более существенным фактором являются климатические условия, менее существенным – качество входящих материальных (или информационных) потоков. Подробная классификация материальных потоков приводит к дополнительным накладным издержкам, поэтому целесообразно использовать укрупненные группы качества. Простой пример конечного автомата для двухфакторного сценария представлен на рисунке 2.
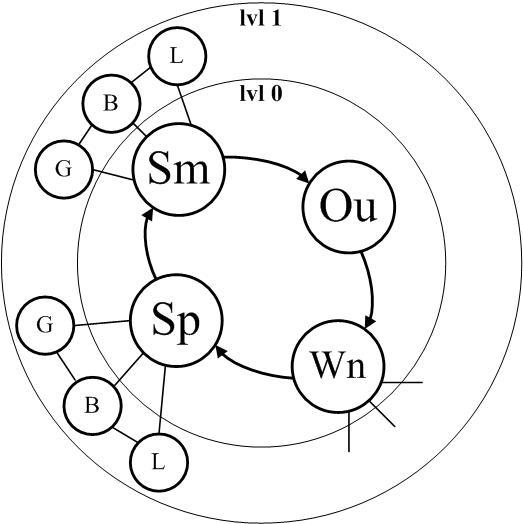
Рисунок 2 – Простой конечный автомат для двух факторов нестационарности
На рисунке 2 представлен граф состояний (конечный автомат) устройства управления, где используются буквенные идентификаторы описания состояний. Идентификаторы (Sm, Ou, Wn, Sp) описывают времена года (лето, осень, зима, весна), идентификаторы внешнего круга описывают качество входящих материальных потоков (G-Good, B-Best, L-Low). С каждым узлом (состоянием) ассоциируется дополнительная информация, возможно несколько путей реализации:
1) Алгоритм управления, его параметры привязываются к конкретным вершинам графа.
2) Вершины графа ассоциируются с таблицами нечеткой логики «правило-действие» при выборе конкретного управления.
Система управления нестационарным объектом
Предлагаемая авторами система управления нестационарным объектом отличается от известных разработок подходом к управлению, когда алгоритм управления выбирается в зависимости от ситуации. Ситуация описывается подмножеством типовых состояний многомерного вектора  , …} или вектором { , …} или вектором { }, который, в свою очередь, может быть реализован в виде многофакторного конечного автомата непосредственно в управляющем устройстве. Это позволяет менять алгоритм (закон) управления в соответствии с гибко-изменяемым сценарием, который может быть сколь достаточно сложным для построения «ограниченно-интеллектуальных» систем управления технологическими объектами. Таким образом, появляется возможность описания «цифрового портрета» определенной ситуации для нестационарной системы, т.н. информационного сечения (“портрета”) группы схожих ситуативных признаков, с выбором соответствующего алгоритма управления. }, который, в свою очередь, может быть реализован в виде многофакторного конечного автомата непосредственно в управляющем устройстве. Это позволяет менять алгоритм (закон) управления в соответствии с гибко-изменяемым сценарием, который может быть сколь достаточно сложным для построения «ограниченно-интеллектуальных» систем управления технологическими объектами. Таким образом, появляется возможность описания «цифрового портрета» определенной ситуации для нестационарной системы, т.н. информационного сечения (“портрета”) группы схожих ситуативных признаков, с выбором соответствующего алгоритма управления.
Далее представлена модифицированная структура системы управления с управляющим устройством, реализованным в соответствии с концепцией конечного автомата. Ключевым отличием предлагаемой схемы от уже известных в ТАУ является учет ряда факторов, влияющих на нестационарность непосредственно в управляющем устройстве и в соответствии с условием, переключение на требуемое управление по алгоритму Round Robin [13,14]. Переключение управления осуществляется в блоке ситуационного переключения алгоритмов. Этот блок может быть реализован в соответствии с описанной в статье концепцией конечного автомата. Общий вид системы управления, представлен на рисунке 3.
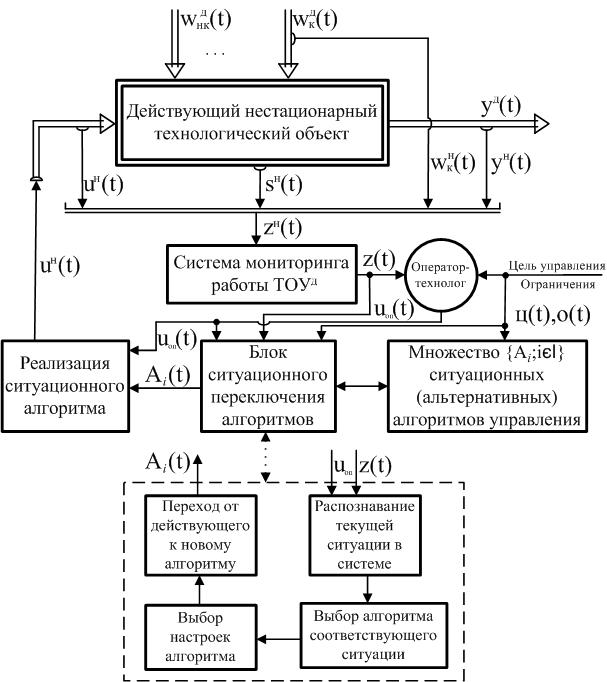
Рисунок 3 – Общая схема системы с переменной структурой при ситуационном переключении альтернативных алгоритмов управления
На схеме представлены стандартные обозначения:  –неконтролируемые и контролируемые внешние воздействия; –неконтролируемые и контролируемые внешние воздействия;  – управление натурное и оператора технолога; – управление натурное и оператора технолога;  – выход действительный и натурный; – выход действительный и натурный;  – состояние технологического объекта; – состояние технологического объекта;  –консолидирующий вектор –консолидирующий вектор  . .
Корректно говорить о системах с переменной структурой (СПС), структура которых изменяется и переключается в зависимости от ситуации. Блок ситуационного переключения алгоритмов может быть реализован на основе формализма конечного автомата, который отражает граничные условия функционирования нестационарного объекта, при которых необходимо изменять управление. Таким образом, работа предлагаемой системы основывается на эволюционном подходе, когда первоначальная модель объекта управления, полученная известными методами идентификации на этапе ввода в эксплуатацию, может быть скорректирована в дальнейшем, с выбором соответствующего управления. Предлагаемый подход имеет перспективы практического применения в условиях сложных нестационарных технологических систем. В дополнение к предлагаемой системе могут реализовываться подсистемы идентификации, для уточнения модели объекта управления для пограничных условий функционирования объекта.
Заключение
Выполнен анализ проблемы управления сложными нестационарными технологическими объектами. Предложен подход к синтезу автоматизированных нестационарных систем управления на основе доменной классификации внешних воздействий и конечного автомата, который предполагает, что характеристики объекта управления в определенных «пограничных» состояниях могут сильно изменяться. Зная эти состояния (исходя из физических и других характеристик системы), можно выбирать соответствующее управление. Конечный автомат отображает состояния объекта в моменты перехода в другие состояния. Таким образом реализуется изменяющееся управление для нестационарной системы при изменении факторов внешней среды.
References
1. Nikolaev P. A. Voprosy pomekhoustoichivosti mikroprotsessornoi sistemy upravleniya avtomobil'nogo dvigatelya // Vestnik VUiT. 2009. №12;
2. Markin V. E. Sintez algoritmov i sistem upravleniya s peremennoi strukturoi dlya ob''ektov vysokogo poryadka // NiKa. 2006. №. URL: https://cyberleninka.ru/article/n/sintez-algoritmov-i-sistem-upravleniya-s-peremennoy-strukturoy-dlya-obektov-vysokogo-poryadka (data obrashcheniya: 25.01.2018);
3. Purgina M. V. Sistemy organizatsionnogo upravleniya IT-servisami so strukturnoi neopredelennost'yu / M. V. Purgina, R. S. Koinov, A. S. Dobrynin // Vestnik Astrakhanskogo gosudarstvennogo tekhnicheskogo universiteta. Seriya. Upravlenie, vychislitel'naya tekhnika i informatika : nauchnyi zhurnal. – 2016. – № 1. – S. 32-40. – Bibliogr.: s. 40 (10 nazv.). – Rezhim dostupa: http://elibrary.ru;
4. Purgina M. V. Razvitie servisov informatsionnykh kompleksov v usloviyakh neopredelennosti / M. V. Purgina // Modelirovanie i naukoemkie informatsionnye tekhnologii v tekhnicheskikh i sotsial'no-ekonomicheskikh sistemakh : trudy IV Vserossiiskoi nauchno-prakticheskoi konferentsii s mezhdunarodnym uchastiem, 12-15 aprelya 2016 g. – Novokuznetsk, 2016. – Ch. 2.-S. 130-134. – Bibliogr.: s. 134 (10 nazv.). – Rezhim dostupa: http://library.sibsiu.ru;
5. Ignat'ev V.V. Adaptivnye gibridnye sistemy upravleniya / V.V. Ignat'ev // Informatsionnoe obshchestvo: idei, tekhnologii, sistemy: trudy Mezhdunarodnoi nauchnoi konferentsii, Chast' 3. – Taganrog: Izd-vo TTI YuFU, 2009. S. 31-32. – Bibliogr.: s. 32.;
6. Skorospeshkin V.N. Adaptivnaya sistema avtomaticheskogo regulirovaniya // Internet-zhurnal Naukovedenie. 2014. №2 (21). URL: https://naukovedenie.ru/PDF/83TVN214.pdf (data obrashcheniya: 31.05.2018).;
7. Bobtsov A.A., Nagovitsyna A.G. Adaptivnoe upravlenie po vykhodu lineinymi nestatsionarnymi ob''ektami // Avtomatika i telemekhanika.-2006.-№12.-S. 163-174;
8. Furtat Igor' Borisovich, Tsykunov Aleksandr Mikhailovich. Robastnoe upravlenie nestatsionarnymi ob''ektami s neizvestnoi peremennoi otnositel'noi stepen'yu // UBS. 2011. №33;
9. UML. Proektirovanie sistem real'nogo vremeni, parallel'nykh i raspredelennykh prilozhenii: Per. s angl.-M.: DMK Press, 2011.-704 s.: il. (Seriya «Ob''ektno-orientirovannye tekhnologii v programmirovanii»);
10. Volkova E. D., Strabykin A. D. Analiz i transformatsii ispolnyaemykh uml modelei // Trudy ISP RAN. 2006. №. URL: https://cyberleninka.ru/article/n/analiz-i-transformatsii-ispolnyaemyh-uml-modeley (data obrashcheniya: 30.04.2018);
11. Rotach V.Ya. Teoriya avtomaticheskogo upravleniya. Uchebnik dlya vuzov. — 2-e izd., pererab i dop. — M.: Izdatel'stvo MEI, 2004. — 400 s.;
12. Marchenkov S.S. Konechnye avtomaty. — M.: Fizmatlit, 2008. — 56 s. — ISBN 978-5-9221-0946-8;
13. Tanenbaum Endryu S, Bos Kherbert. Sovremennye operatsionnye sistemy. 5-e izd. — SPB.: Piter, 2017. — 1120 s. il. — (seriya "Klassika Computer Science"). ISBN 978-5-496-01395-6;
14. Egorov V.Yu. Novye podkhody k dispetcherizatsii zadach v operatsionnykh sistemakh / V.Yu. Egorov // Izvestiya vysshikh uchebnykh zavedenii. Povolzhskii region. Tekhnicheskie nauki. — 2008. – №2. – s. 56-63. URL: http://izvuz.pnzgu.ru/files/izvuz.pnzgu.ru/tn_2008_2.pdf (data obrashcheniya: 30.04.2018).
Link to this article
You can simply select and copy link from below text field.
|
|





