MAIN PAGE
> Back to contents
Electronics and Machinery
Reference:
Gubanova A.A., Kislov K.V.
Development of a Three-Phase Asynchronous Motor Control Module with Autonomous Power Supply
// Electronics and Machinery.
2018. № 4.
P. 16-23.
DOI: 10.7256/2453-8884.2018.4.28421 URL: https://en.nbpublish.com/library_read_article.php?id=28421
Development of a Three-Phase Asynchronous Motor Control Module with Autonomous Power Supply
Gubanova Aleksandra Anatol'evna
Lecturer at Don State Technical University.
344000, Russia, Rostovskaya oblast', g. Rostov-Na-Donu, Gagarina, 1

|
anatoliya81@mail.ru
|
|
 |
Other publications by this author
|
|
|
Kislov Kirill Vadimovich
post-graduate student at Don State Technical University
344000, Russia, Rostovskaya oblast', g. Rostov-Na-Donu, pl. Gagarina, 1, of. 6-303
|
|
Kislovk@bk.ru
|
|
 |
|
DOI: 10.7256/2453-8884.2018.4.28421
Received:
17-12-2018
Published:
02-02-2019
Abstract:
The subject of the research is the control module of a three-phase asynchronous motor with Autonomous power supply; this module is designed for vector control of an asynchronous three-phase motor. The device is made on the basis of modern achievements of microelectronics technologies, digital - analog integrated circuits and digital and analog signal processing controller with built-in PWM circuits.Field of application of the developed device: can be used in any enterprise to control machines with asynchronous drive.The designed device is designed to control an asynchronous motor and regulates and measures its main parameters. At the heart of the control module control three-phase asynchronous motor with Autonomous power supply is a method that is based on the implementation of the regulation of the measurement of its basic parameters based on vector control. The developed device should be implemented in the form of a structure consisting of a certain number of functional subsystems reflecting the principles of decomposition both on a technological basis and in accordance with the hierarchy of implemented management tasks.In the course of the work, the schemes of electrical structural and principal, as well as the printed circuit Board of the device were developed. The developed module is characterized by small dimensions, the possibility of modernization, and low cost.
Keywords:
control module, asynchronous motor, Autonomous power supply, microcontroller, printed circuit board, display, communication interface, signal diagram, sensor, system reliability
This article written in Russian. You can find original text of the article here
.
Любой модуль управления двигателем можно представить как ряд составляющих: силовые транзисторы (инвертор), драйверы управления этими транзисторами, схемы защиты транзисторов инвертора и нагрузки от различного рода неисправностей и схемы управления, формирующие логические сигналы управления инвертором. При этом независимо от схемы управления, формирующей логику работы модуля («активная» схема), непосредственно схема управления инвертором («пассивная») остается неизменной практически для всех типов двигателей, меняется только количество фаз.
В настоящее время существует большое количество аналогичных по структуре модулей, однако всем им присущ серьезный недостаток: они производятся зарубежными компаниями: из этого следуют высокая цена, проблемы с поставками, невозможность настройки модуля под конкретные требования заказчика и др.
Целью работы является обеспечение работы асинхронного двигателя в безопасных для него режимах, предотвращая ударные механические и электрические нагрузки и ограничивая потребляемый ток, а именно:
- управление любым типом нагрузки в соответствии с управляющими сигналами;
- защита от:
- токовых перегрузок;
- короткого замыкания;
- перегрева;
- одновременного включения транзисторов верхнего и нижнего плеча инвертора;
- перенапряжения в силовых цепях инвертора;
- регулировка порога срабатывания токовой защиты;
- питание модуля непосредственно от силовой цепи;
- возможность запитывать внешние схемы собственным стабилизированным напряжением c защитой от перегрузки по току.
Модуль управления трехфазным асинхронным двигателем с автономным питанием предназначен для управления асинхронным двигателем и осуществляет регулирование и измерение его основных параметров на основе векторного управления.
Для реализации поставленных задач разрабатываемое устройство должно обеспечивать:
· пуск и останов двигателя;
· изменение частоты вращения вала двигателя.
Визуально структурную схему можно разделить на одиннадцать блоков (см. рисунок 1):
- микроконтроллер PIC18458;
- драйвер силовых ключей;
- силовые ключи;
- двигатель;
- блок перенапряжения;
- тормозной резистор;
- источник питания;
-клавиатура;
- индикация;
- интерфейс связи.
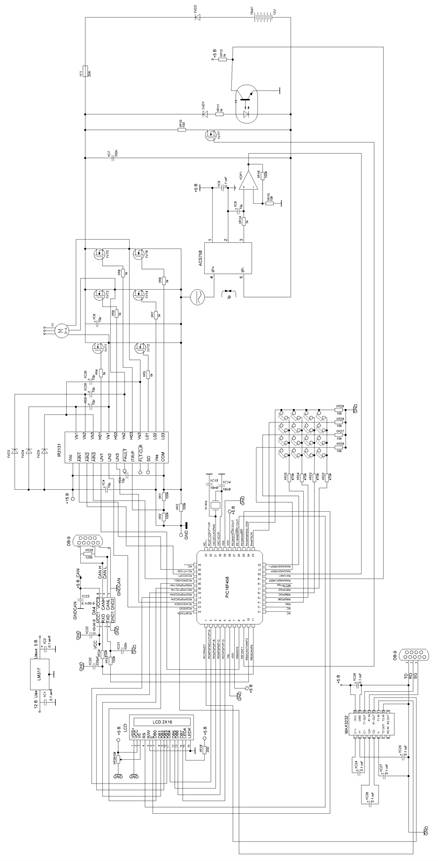
Более подробно работу модуля управления трехфазным асинхронным двигателем с автономным питанием целесообразно рассмотреть с помощью схемы электрической принципиальной.
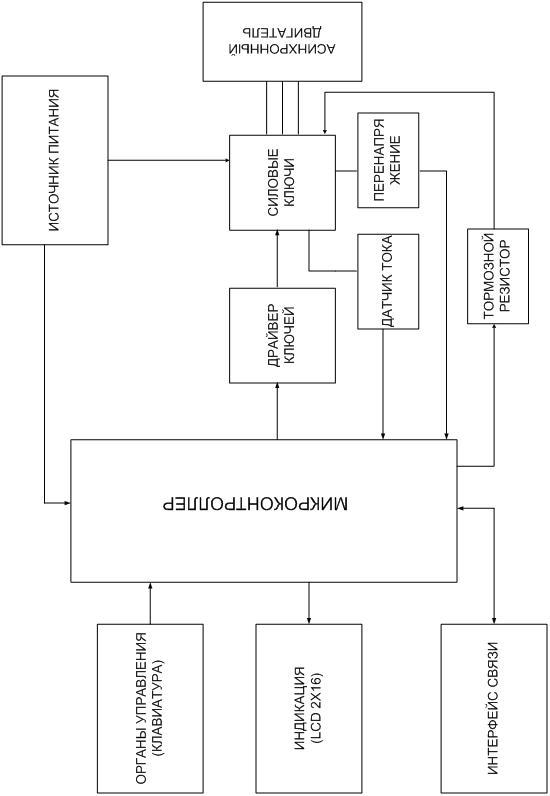
Рисунок 1- Структурная схема модуля управления трехфазным асинхронным двигателем с автономным питанием
Модуль управления трехфазным асинхронным двигателем с автономным питанием состоит из микроконтроллера PIC18F458, асинхронного двигателя, индикатора LCD-дисплея (2-х строчный по 16 символов), клавиатуры, которая задается командой управления, двух интерфейсов связи RS-232 и CAN-интерфейсом, драйвера силовых ключей IR2131 и силовых ключей VT1-VT6.
Силовые ключи IR2131 предназначены для согласования уровней из TTL-уровней и датчика обратной связи (ОС) (датчик тока ACS758), который включен между минусовым проводом и силовыми ключами (является ОС по току).
В качестве датчика тока (ДТ) на схеме применен датчик ACS713, работающий на эффекте Холла, который регистрирует превышение тока и напряжение (Т1). ДТ имеет важные преимущества: благодаря своему миниатюрному корпусу он позволил сэкономить место на схеме, а также на нем не происходит падение напряжения и он не позволяет терять мощность в пустую.
Также в схеме предусмотрена RBRAKE – цепь с электролитом в цепи питания и силовым транзистором (VT7), разряжающим эту емкость по сигналу микроконтроллера.
Также предусмотрена цепь датчика перенапряжения с гальванической развязкой (оптопара Т1).
Алгоритм работы схемы управления можно рассмотреть с помощью диаграммы выходных сигналов и соответствующие им диаграммы выходных напряжений инвертора (при активной нагрузке). Длительность импульсов 1,11 миллисекунды, а длительность паузы между ними (внутри пачки) зависит от частоты, и при частоте выходного напряжения инвертора 50 Гц составляет около 20 микросекунд (защитный интервал, полностью исключающий возможность возникновения сквозных токов в инверторе).
Рисунок 2- Диаграмма выходных сигналов схемы управления
Принцип управления состоит в использовании инвертора на IGBT транзисторахIRG4BC40K, к которому подключается АД мощностью 0.75 кВт.
Учитывая условия эксплуатации устройства и допускаемые значения воздействующих факторов по группам жесткости, оговоренным государственным стандартом ГОСТ 23752-79 устанавливаем: плата должна соответствовать ГОСТ 23752-79, группа жесткости 1. Группа жесткости 1 подразумевает следующие климатические условия [1]:
- температура воздуха от -30ºС до +35ºС
- влажность воздуха примерно 75%
- атмосферное давление нормальное (761 мм.рт.ст)
Определяем тип печатной платы. По конструктивным особенностям печатные платы с жестким основанием делятся на типы: односторонние, двусторонние и многослойные.
Выбираем двустороннюю печатную плату (ДПП), так как она характеризуется:
- возможностью обеспечить повышенные требования к точности выполнения проводящего рисунка;
- механической прочностью платы;
- уменьшением сопротивлений всех подключений к общему проводу, что, в свою очередь, уменьшает шум и наводки;
- увеличением распределенной емкостью для каждой цепи схемы, помогая подавлять излучаемый шум.
Рисунок 3- Схема электрическая принципиальная модуля управления трехфазным асинхронным двигателем с автономным питанием
Выбираем габаритные размеры и конструкцию печатной платы. С этой целью из государственного стандарта ГОСТ 29137-91 выбираем варианты установки навесных элементов и выполняем компоновку графическим методом. В результате компоновки получена печатная плата простой прямоугольной формы с размерами 170х100 мм, размеры каждой стороны печатной платы кратны 5 и соотношения сторон близки к 1:1 Толщина платы определяется с учетом нагрузки на печатную плату, минимального диаметра отверстия и коэффициента γ для 3-го класса точности изготовления печатной платы.
 (1) (1)
где dmin – минимальный диаметр отверстия на печатной плате;
γ - коэффициент нагрузки (для 3 класса точности равен 0,33).
 мм. мм.
Толщина платы 1,5мм.
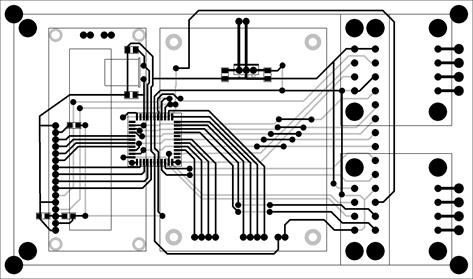
Рисунок 4- Плата печатная (блок модуля силовой части)
Интенсивность отказов устройства с учетом режимов работы рассчитывается по формуле 2 [2] и результат записывается в таблицу 1.
|

|
(2)
|
Учитывая все электронные компоненты модуля, имеем:
Определяется среднее время наработки до отказа [3]:
|
 час час
|
(3)
|
Вычисляется вероятность безотказной работы в течение заданного промежутка времени t = 10000 часов:
|
|
(4)
|
Строится график вероятности безотказной работы устройства.
Таблица 1- Вероятность безотказной работы устройства
|
t, ч
|
0
|
10
|
100
|
1000
|
5000
|
10000
|
15000
|
20000
|
|
P(t)
|
1
|
0,999
|
0,994
|
0,939
|
0,732
|
0,535
|
0,391
|
0,286
|
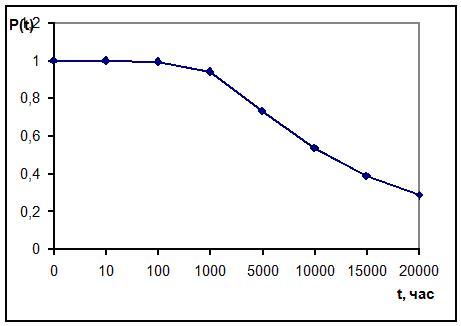
Рисунок 5 – График зависимости безотказной работы от времени
Разработанный модуль управления трехфазным асинхронным двигателем с автономным питанием по электрическим, конструктивным и эксплуатационным характеристикам соответствует современным требованиям правил безопасности.
Данная разработка отличается малыми габаритными размерами (170х100ммх1,5), низкой потребляемой мощностью, широкими функциональными возможностями. В устройстве используется современная, широкодоступная, дешевая элементная база. Применение микроконтроллера в качестве устройства управления и обработки информации значительно сокращает количество элементов.
Проведенный расчет надежности показал, что среднее время наработки до отказа составило 15885 часов. При круглосуточной работе устройство обеспечивает безотказную работу в течение примерно 2-х лет.
References
1. Skhemotekhnika elektronnykh sredstv: Uchebnoe posobie / Palii A.V., Saenko A.V., Zamkov E.T.-Taganrog:Yuzhnyi federal'nyi universitet, 2016.-92 s.: ISBN 978-5-9275-2128-9-Rezhim dostupa: http://znanium.com/catalog/product/994772
2. Teoriya elektricheskikh tsepei, skhemotekhnika telekommunikatsionnykh ustroistv, radiopriemnye ustroistva sistem mobil'noi svyazi,radiopriemnye ustroistva sistem radiosvyazi i radiodostupa: Laboratornyi praktikum-III Uchebnoe posobie / Frisk V.V., Lovginov V.V.-M.:SOLON-Pr., 2016.-480 s.: il. ISBN 978-5-91359-167-8-Rezhim dostupa: http://znanium.com/catalog/product/884455
3. Proektirovanie analogovykh i tsifrovykh ustroistv: Uchebnoe posobie / V.S. Titov, V.I. Ivanov, M.V. Bobyr'.-M.: NITs INFRA-M, 2014.-143 s.: 60x88 1/16.-(Vysshee obrazovanie: Bakalavriat). (oblozhka) ISBN 978-5-16-009101-3-Rezhim dostupa: http://znanium.com/catalog/product/42272
Link to this article
You can simply select and copy link from below text field.
|