|
DOI: 10.7256/2453-8884.2018.2.26014
Received:
13-04-2018
Published:
07-05-2018
Abstract:
At present, a stepper motor drive which has already become a traditional executive device for many electronic devices and systems is a good alternative to microdrives consisting of a high-speed motor with feedback and a mechanical gearbox. The subject of study of this article is a stepper motor. In this paper, the control object (OS) is a two-coordinate transport module based on linear stepper motors (LSD) which is used for the manufacture of high integration chips. For this purpose, a probe that includes a two-coordinate transport module is used. In this article, the technique of controlling the full-step mode was used for a linear stepper motor when designing the system. The stepper motor control system is designed to generate signals on the stepper motor windings and control the rotation speed of its shaft as well as to control the number of pivot steps. In the course of the study, the author developed structural and electric schemes and an algorithm for controlling the system. The developed system is characterized by small overall dimensions, low power consumption, wide functionality. The device uses a modern, widely available, low-cost element base.
Keywords:
linear stepper motor, management driver, management interface, controller, electric drive, pulse sensor, Feedback, rotational speed, source of power, position sensor
This article written in Russian. You can find original text of the article here
.
Шаговый привод как недорогая альтернатива наилучшим образом подходит для автоматизации отдельных узлов, модулей и систем, где не требуется высокая динамика [1]. Задачи, решаемые при помощи шагового привода, разнообразны. Шаговые двигатели устанавливаются в устройствах и механизмах, требующих высокой надежности и точности: когда требуется позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением [2].
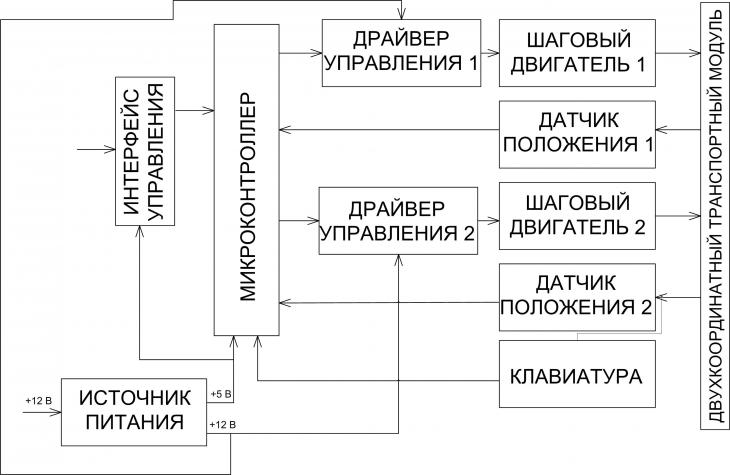
Рисунок 1- Структурная схема системы управления шаговым двигателем
Структурно схема состоит из следующих блоков:
- шагового двигателя 1 и 2;
- микроконтроллера;
- интерфейса управления;
- драйвера управления 1 и 2;
- датчика положения 1 и 2;
-импульсного источника питания;
- компьютерной клавиатуры.
Принцип работы системы более подробно рассмотрим на примере схемы электрической принципиальной, представленной на рисунке 2.
Управляющие команды двигателем могут поступать по одному из двух интерфейсов связи либо по USB, либо по UART, при этом выбор между одним из этих интерфейсов осуществляется переключением соответствующих четырех микропереключателей, так же установленных на плате.
Модуль управления реализован на микроконтроллере AVR ATMega48, совмещенный с драйвером L6205, позволяющим управлять приводом, как на базе шагового двигателя, так и двигателя постоянного тока. Контроллер работает с тактовой частотой 10МГц, с напряжением питания +5В. USB интерфейс реализован на базе преобразователя FTDI FT232R, позволяющего выполнить быстрое сопряжение стандартных UART и USB интерфейсов. Для отслеживание начального (нулевого) положения вала двигателя на плате установлен оптический щелевой датчик нуль-метки, производства компании Honeywell HOA08. Этот датчик позволяет однозначно определить начальное положение вала двигателя при новой подаче напряжения питания или сброса программы микроконтроллера. Стабильное напряжение питания микроконтроллера поддерживает импульсный понижающий DC-DC преобразователь LM2594M.
Модуль подключается к стандартному USB порту персонального компьютера, через кабель с ответным разъемом miniUSB, или по последовательному интерфейсу UART к другой микропроцессорной системе, при этом уровень сигналов составляет +5В. Для программирования микроконтроллера предусмотрен интерфейс ISP, с контакными площадками для подключения стандартного программатора AVR. Стоит так же отметить то, что для отображения текущего режима работы или индикации ошибки на модуле установлен светодиод, подключенный непосредственно к контроллеру. Типовое напряжение питания системы управления +12В , при этом минимальные его уровень составляет чуть более 8 В и ограничен 20В.
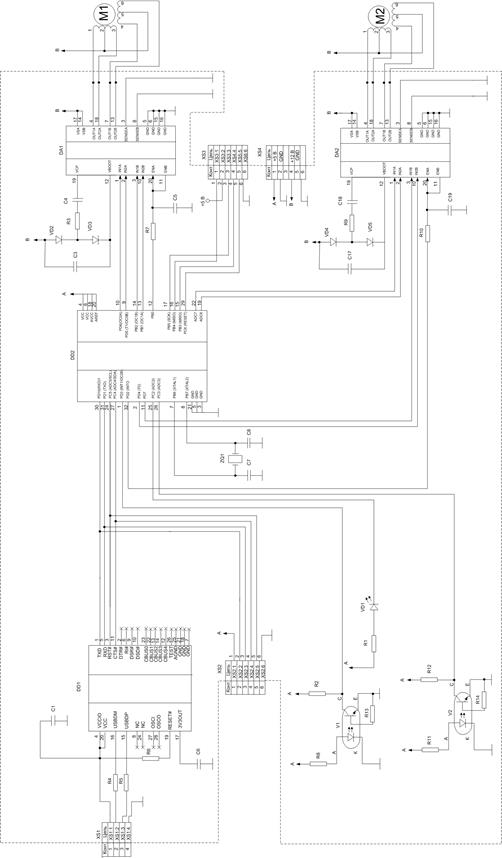
Рисунок 2 - Схема электрическая принципиальная системы управления шаговым двигателем
Алгоритм основной программы (рисунок 3) выполняет управление скоростью вращения вала шагового двигателя и контролирует количество шагов поворота. Данный алгоритм идентичен для двигателя 1 и двигателя 2.
Принцип работы алгоритма приведен ниже.
1. Начало работы
2. Установление ШД в нулевом положении
3. Ожидание данных частоты вращения ω и скорости импульсов С от разъема miniUSB.
4. Цикл «Новые данные?» (в этом цикле если приходят новые данные, то программа переходит к следующему блоку. Если чтение данных не началось, то происходит возврат к блоку «Ожидание данных частоты вращения ω и скорости импульсов С»)
5. Пересчет частоты вращения ω в частоту импульсов.
6. Формирование управляющих импульсов (в этом блоке происходит непосредственное включение ШД)
7. Считывание данных с датчика импульсов обратной связи.
8. Цикл «Скорость меньше требуемой?» (в этом цикле если значение скорости равно заданному, то двигатель работает в стационарном режиме и обновлений не требуется. Если скорость меньше требуемой, то в работу включается блок «Ускорение управляющих импульсов», т.е. двигатель ускоряется и достигает требуемой скорости. Если в цикле «Скорость больше требуемой?» условие выполняется, то двигатель замедляется, реверсируется и достигает требуемой скорости).
9. Цикл «Количество импульсов достигло требуемого?» (если данное условие не выполняется, то сигнал поступает на блок «Считывание данных с датчика импульсов обратной связи» до тех пор, пока количество импульсов не будет соответствовать требуемому значению. Если условие цикла выполняется, то происходит переход на следующий блок).
10. Остановка ШД (информация с данного блока по циклу возвращается к блоку «Ожидание данных частоты вращения ω и скорости импульсов С от разъема miniUSB» и работа системы возобновляется заново).
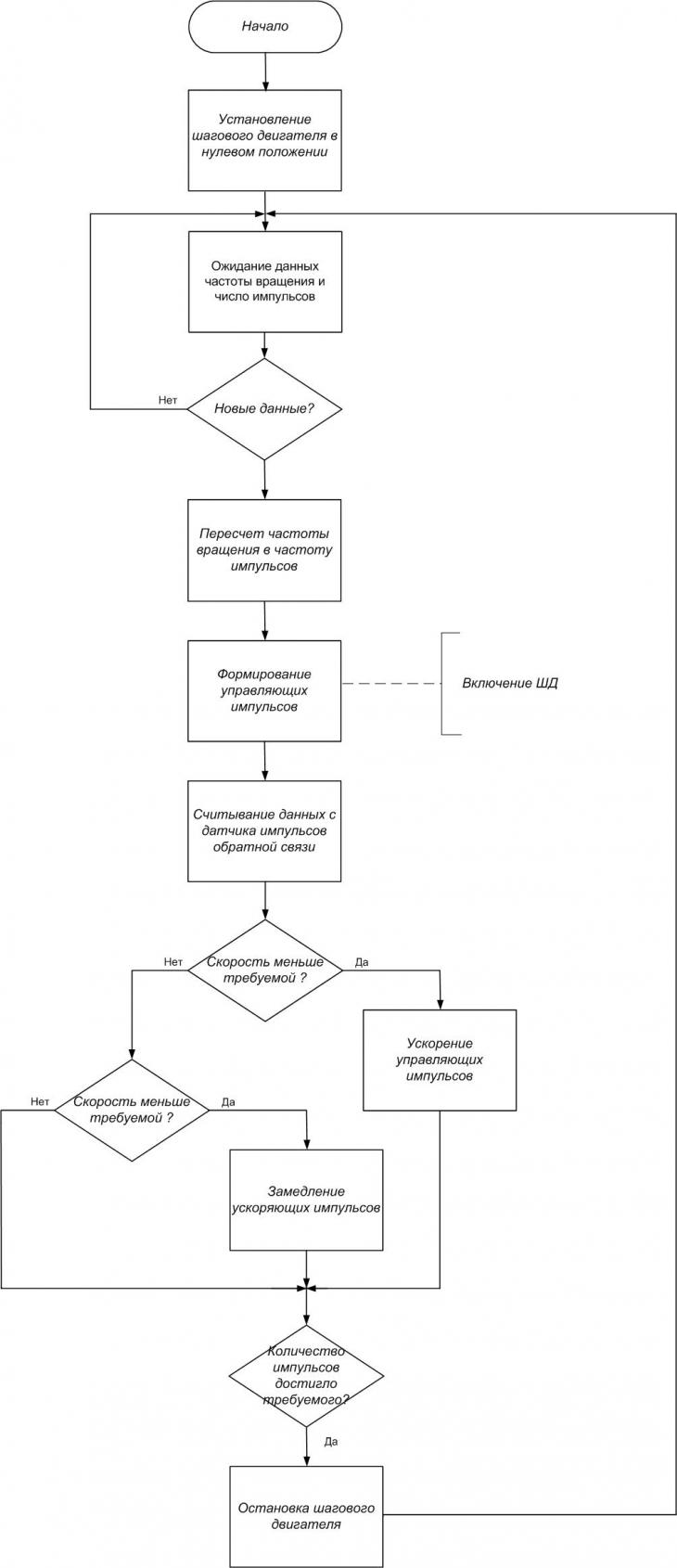
Рисунок 3- Алгоритм работы системы управления шаговым двигателем
Таким образом, в данной работе была разработана система управления шаговым двигателем на основе современной электронной базы. Разрабатываемая система по технической реализации должна осуществлять управление шаговым двигателем, обеспечивать скоростью вращения его вала и контролировать количество шагов поворота.
References
1. Teoriya avtomobilei i dvigatelei: Uchebnoe posobie / V.P. Tarasik, M.P. Brench.-2-e izd., ispr.-M.: NITs Infra-M; Mn.: Nov. znanie, 2013.-448 s
2. Ivanov, G.Ya. Elektroprivod i elektrooborudovanie [Elektronnyi resurs] : uchebnoe posobie / G.Ya. Ivanov, A.Yu. Kuznetsov, V.V. Dmitriev; Novosib. gos. agrar. un-t. Inzhener. in-t. – Novosibirsk, 2011. – 56 s
Link to this article
You can simply select and copy link from below text field.
| 




