|
MAIN PAGE
> Back to contents
Cybernetics and programming
Reference:
Dobrynin A.S., Koynov R.S., Kulakov S.M., Gudkov M.Y.
On the domain (situational) identification of complex non-stationary technological objects
// Cybernetics and programming.
2018. № 4.
P. 52-59.
DOI: 10.25136/2644-5522.2018.4.26861 URL: https://en.nbpublish.com/library_read_article.php?id=26861
On the domain (situational) identification of complex non-stationary technological objects
Dobrynin Aleksey Sergeevich
Senior Lecturer, Department of Automation and Information Systems, Siberian State Industrial University
654007, Russia, Kemerovskaya oblast', g. Novokuznetsk, ul. Kirova, 42

|
serpentfly@mail.ru
|
|
 |
Other publications by this author
|
|
Koynov Roman Sergeevich
Leading Specialist for Informatization, Siberian State Industrial University
654041, Russia, Kemerovskaya oblast', g. Novokuznetsk, ul. Kirova, 42
|
|
koynov_rs@mail.ru
|
|
 |
Other publications by this author
|
|
Kulakov Stanislav Matveevich
Doctor of Technical Science
Professor, Department of Automation and Information Systems, Siberian State Industrial University
654007, Russia, Kemerovskaya oblast', g. Novokuznetse, ul. Kirova, 42
|
|
kulakov-ais@mail.ru
|
|
 |
Other publications by this author
|
|
|
Gudkov Mikhail Yur'evich
Senior Lecturer, Department of Automation and Information Systems, Siberian State Industrial University
654007, Russia, Kemerovskaya oblast', g. Novokuznetsk, ul. Kirova, 42, kab. 542
|
|
jobs.goodkoff@gmail.com
|
|
 |
Other publications by this author
|
|
|
DOI: 10.25136/2644-5522.2018.4.26861
Received:
14-07-2018
Published:
15-09-2018
Abstract:
The subject of the research are approaches to the identification of structurally distributed and complex non-stationary technological objects of automated control. The object of study is a non-stationary automated control system. The authors consider in detail the approach of domain identification of objects of automated control based on key (control) points. Special attention is paid to the issues of determining the adequacy of the model for a non-stationary object of automated control. The proposed approach allows iteratively correcting (refining) the object model upon the occurrence of control points (significant changes in the parameters of a multifactorial environment). The main methods of research were used elements of system analysis, natural-mathematical modeling. Additionally, known identification methods were used, incl. using test influences and conversion math models. The main conclusion of the study is the statement that a complex non-stationary technological object cannot be adequately described by a single mathematical model, therefore the identification of such an object must be done several times. The novelty of the research lies in the use of new elements of the domain identification of non-stationary technological objects at the control points, which allows adapting the control to the conditions for changing the multi-factor environment.
Keywords:
domain identification, technological object, nonstationary system, automation, control system, variable structure, object model, situational management, active experiment, test impact
This article written in Russian. You can find original text of the article here
.
Введение
При рассмотрении вопросов синтеза автоматизированных систем управления значительное внимание уделяется вопросам идентификации объектов управления. Целью применения известных методов идентификации [1,2,3] является получение модели объекта управления, на основе которой можно выбрать (синтезировать) эффективный алгоритм управления и найти его настройки. При этом часто используются приближенные методики, когда реальный объект управления, со всеми его сложностями описывается упрощенной вход-выходной моделью в виде линейного дифференциального уравнения с достаточно грубым приближением к реальным практическим условиям. Более того, многие методы идентификации разработаны для идеальных условий. Часто предполагается, что характер и структура входных воздействий не может резко измениться за короткий промежуток времени, а внутренние состояния объекта по каналам управления не подвержены существенным изменениям. Реальность такова, что свойства объекта по отдельным каналам управления изменяются во времени, в тех случаях, когда он сложен по конструкции, является крупногабаритным, а также вследствие изменений и улучшений конструкции, взаимосвязей, технологических особенностей функционирования и комплекса других причин. Иначе говоря, пространственно распределенный и любой другой сложный объект может постоянно изменять свое поведение, вследствие изменения внутренних характеристик, изменения свойств сырья, природных условий. Классическая техническая кибернетика и ТАУ исходят из предположения, что объекты и их внешняя среда не подвержены изменениям, что справедливо для простых и средних, по сложности систем. Во многих задачах синтеза управляющей системы [4] используется единственная модель объекта, к примеру, инерционное звено первого порядка с запаздыванием и утверждения, что эта модель адекватна. Также иногда подчеркивается, что необходимо решить задачу идентификации объекта без уточнения изменяющихся обстоятельств и условий его работы. Таким образом, за «математикой» можно и не увидеть сложность реальных систем. Чем больше факторов воздействует на объект, тем вероятнее он изменится в течение определенного времени.
Подход доменной идентификации
Речь идет о необходимости применения автоматизированных систем управления с изменяемым поведением, когда некоторая математическая модель объекта отражает его текущее поведение (по каналам управления и (или) возмущений). Такой подход обуславливает реальная необходимость. Объекты автоматизированного управления, как и многие другие системы, проходят закономерные и последовательные этапы жизненного цикла, в течение и по истечению которых изменяются их характеристики, что закономерно и естественно. Таким образом «монолитный» подход типа «один объект, одна модель» не оправдывает себя в большинстве случаев. Современный технологический объект автоматизированного управления уже на начальных этапах своего жизненного цикла связан множеством сложных и нелинейных связей с окружающим миром и, по мере прохождения этапов жизненного цикла эти связи только усложняются. При этом, дополнительные сложности с идентификацией современных технологических объектов управления только увеличиваются, поскольку непрерывно изменяются (эволюционируют) сами объекты. Перечислим основные причины, по которым происходит непрерывное изменение свойств сложного технического объекта (СТО):
1) Эволюция, связанная с переосмыслением, улучшением и изменением конструкции технического объекта, например, классической доменной печи или беспилотного летательного аппарата.
2) Изменение параметров технологического объекта управления в процессе эксплуатации, из-за влияния изменяющихся внешних контролируемых и неконтролируемых воздействий.
3) Изменение данных, технических средств и программного обеспечения автоматизированных систем. Вследствие актуализации алгоритмов и программного обеспечения.
4) Модернизация, изменение структуры, старение, выход из строя технологических элементов объекта, что влияет на поведение системы в целом.
5) Изменение состава и качества перерабатываемого технологическим объектом сырья.
Статья рассматривает новый подход, основанный на доменной (ситуационной) идентификации сложных изменяющихся технологических объектов. Ключевым отличием этого подхода от многих других, является идея о том, что адекватность математической модели реального технологического объекта, следует рассматривать только во взаимосвязи с определенными условиями, ситуациями; в некотором информационном «разрезе», домене, на определенном отрезке времени. Объект управления всегда функционирует в определенном многофакторном окружении, в материально-информационном фоне (поле, домене). Как только многофакторное окружение нестационарного технологического объекта изменяется, меняется и сам объект или режим его работы. При этом математическая модель и алгоритм управления объектом также должны быть изменены. Таким образом, при изменении внешних и внутренних условий, необходимо запускать процедуры доменной (ситуационной) идентификации технологического объекта. Принцип доменной идентификации иллюстрирует ситуационный метод. Например, при наступлении некоторой контрольной точки (падения температуры, или истечения отрезка времени  ) необходимо осуществлять идентификацию объекта автоматизированного управления. При этом очень важно учитывать, что объект функционирует в условиях замкнутого (через автоматику или оператора-технолога) контура управления. Способ идентификации в условиях замкнутого контура управления впервые (в прикладном плане) был предложен и применен в работах Веревкина В.И., Авдеева В.П. [5, 6]. ) необходимо осуществлять идентификацию объекта автоматизированного управления. При этом очень важно учитывать, что объект функционирует в условиях замкнутого (через автоматику или оператора-технолога) контура управления. Способ идентификации в условиях замкнутого контура управления впервые (в прикладном плане) был предложен и применен в работах Веревкина В.И., Авдеева В.П. [5, 6].
Модифицированная модель нестационарного технологического объекта
Авторы предполагают, что адекватно описать реальный нестационарный автоматизированный технологический объект одной моделью практически невозможно(идеальный теоретический случай). Но это можно приближенно сделать, с использованием множества сменяющих друг друга моделей поведения (behavior models),практический случай, когда характеристики меняются во времени. Целесообразно говорить об объектах автоматизированного управления, поведение которых изменяется во времени, в зависимости от внешних факторов, природных условий, режимов работы. То есть, один натурный технологический объект необходимо описывать многими моделями поведения (behavior model).
Представление идеи, что модель нестационарного объекта автоматизированного управления – это, по сути, открытое множество разных вход-выходных моделей поведения, которые можно последовательно идентифицировать при наступлении определенных ситуаций  (изменение материальных потоков, изменение климата, старение объекта), отражает выражение (1): (изменение материальных потоков, изменение климата, старение объекта), отражает выражение (1):
|

|
(1)
|
где  – множественная модель нестационарного объекта управления на периоде времени [0,T], которая включает множество различных сменяющих друг друга моделей поведения, в соответствии со сменой многофакторной доменной среды – в ситуационных или ключевых точках. Таким образом, доменная идентификация нестационарного объекта – это определение последовательно пополняемого множества поведенческих вход – выходных моделей нестационарного объекта управления на определенных разработчиком, граничных условиях функционирования. Наступление контрольных ситуаций можно спрогнозировать, или выделить явно. В данной публикации рассматриваются четыре типа доменов, связанных с процессом изменения реального технологического объекта, с примерами конкретных точек запуска идентификации: – множественная модель нестационарного объекта управления на периоде времени [0,T], которая включает множество различных сменяющих друг друга моделей поведения, в соответствии со сменой многофакторной доменной среды – в ситуационных или ключевых точках. Таким образом, доменная идентификация нестационарного объекта – это определение последовательно пополняемого множества поведенческих вход – выходных моделей нестационарного объекта управления на определенных разработчиком, граничных условиях функционирования. Наступление контрольных ситуаций можно спрогнозировать, или выделить явно. В данной публикации рассматриваются четыре типа доменов, связанных с процессом изменения реального технологического объекта, с примерами конкретных точек запуска идентификации:
1) Время. Введем понятие временного слота, окна квазистационарности  , в течение которого структура и характеристики технологического объекта существенно не изменяются. Размер окна определяет период, в течение которого можно обходиться без запуска процедуры идентификации. Здесь очень важным является вопрос распознавания момента смены ситуации на объекте и в окружающей его среде. В общем случае будем считать, что может непредсказуемо изменяться во времени. , в течение которого структура и характеристики технологического объекта существенно не изменяются. Размер окна определяет период, в течение которого можно обходиться без запуска процедуры идентификации. Здесь очень важным является вопрос распознавания момента смены ситуации на объекте и в окружающей его среде. В общем случае будем считать, что может непредсказуемо изменяться во времени.
2) Окружающая среда. Включает природные условия, погоду, времена года. К указанному домену относятся контролируемые и неконтролируемые внешние воздействия  и и  . Под т.н. «неконтролируемыми воздействиями» подразумевается отсутствие оперативных знаний о влиянии внешней среды на объект, которые можно получить разными способами. В качестве простого примера ключевых точек для доменной идентификации можно использовать граничные климатические условия {«зима», «лето», «осень», «весна»}, или, для большей детализации моделей поведения, – месяцы {«январь», «февраль», …}. . Под т.н. «неконтролируемыми воздействиями» подразумевается отсутствие оперативных знаний о влиянии внешней среды на объект, которые можно получить разными способами. В качестве простого примера ключевых точек для доменной идентификации можно использовать граничные климатические условия {«зима», «лето», «осень», «весна»}, или, для большей детализации моделей поведения, – месяцы {«январь», «февраль», …}.
3) Активы, включая информацию. Воздействие на систему, включающую ОУ, активов (материальных, информационных, кадровых и т.д.) может существенно измениться, в том числе, на долгосрочную перспективу. К примеру, изменение качества угля или металлолома на металлургическом комбинате, сокращение штатов, изменение нормативной и регламентирующей документации, связанной с работой объекта управления. В качестве примера контрольных точек здесь могут служить значения физических и химических параметров сырья, даты обновления технологических инструкций.
4) Развитие. Изменения систем, целей и задач управления присутствуют всегда, в сложных технологических системах. Они связаны с неизбежными процессами обновления, в частности, заменой оборудования и отдельных технологических узлов, переосмыслением задач управления.
Будет разумным утверждение, что не для всех сложных технологических объектов управления (СТОУ) требуется выполнять идентификацию в разрезе четырех доменов (время, окружающая среда, активы, развитие), однако для большинства систем время, износ узлов и агрегатов, является неоспоримым фактором изменения поведения объектов в целом.
Примеры сложных нестационарных технологических объектов
Рассматривая примеры существующих технологических объектов, которые уверенно можно отнести к многорежимным и нестационарным, выделим конкретные примеры:
- доменная печь (управление «сверху» путем изменения рудной нагрузки и (или) «снизу», посредством изменения параметров дутья);
- кислородно-конвертерное производство стали в системе «конвертер – агрегат печь/ковш»;
- агломерационная машина (управление качеством агломерата, скоростью движения аглоленты, температурой горна);
- колонна синтеза аммиака из природного газа;
- беспилотный летательный аппарат с ситуационно изменяемым режимом полета (например, при входе в зону, контролируемую противником);
- роботизированные комплексы сборки готовых изделий;
- промышленный 3D-принтер.
Система управления с доменной идентификацией нестационарного объекта
Предлагаемая авторами система управления доменной идентификацией нестационарного объекта отличается от известных разработок идентификацией по ситуациям (контрольным точкам). Большинство исследований в этой области, не предполагает, что свойства технологического (технического) объекта изменяется со временем и при воздействии многофакторной (доменной) среды. Доменная идентификация нестационарного технологического объекта осуществляется ситуационно (с использованием распознавателя) или в соответствии с командами «сверху», что позволяет отслеживать изменяющееся поведение. Таким образом, доменная идентификация осуществляется много раз, в соответствии с принятой стратегией и накопленными знаниями об объекте управления. Можно использовать типовые стратегии, если известно как характеристики объекта изменяются со временем в течение его жизненного цикла. К примеру, для одного объекта целесообразно выполнять идентификацию один раз в год, для другого – один раз в месяц или неделю.
Далее представлена модифицированная система управления (с переменной структурой) с доменной идентификацией, реализованной в соответствии с распознаванием контрольных точек (control points). Контрольные точки определяются на множестве состояний окружающей среды (климат, время и т.д.) исходя из условий, требований к функционированию, конструктивных особенностей нестационарного многорежимного объекта управления. Принципиальным отличием схемы является подход, при котором объект управления изменяется вместе со средой, когда изменяющееся поведение среды, приводит к изменению свойств и поведения объекта заранее неизвестным образом. Следовательно, идентификацию объекта управления необходимо осуществлять при смене ситуаций в системе или ее окружении. Авторами предлагается доменный метод идентификации изменяющегося (по ситуациям или во времени) объекта управления. Общий вид системы управления, представлен на рисунке 1.
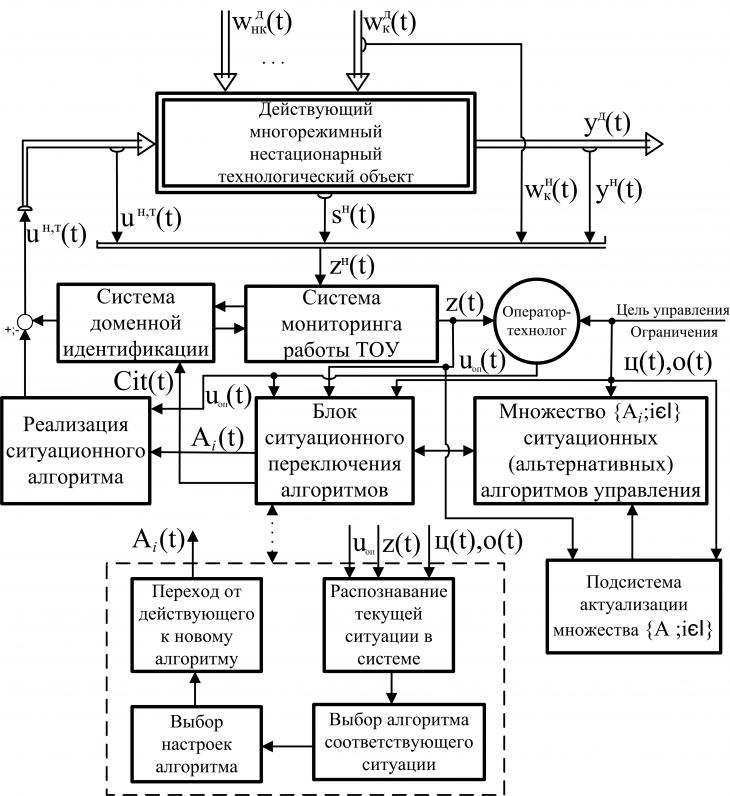
Рисунок 1 – Общая схема автоматизированной системы с доменной идентификацией ОУ
На схеме приняты следующие обозначения: , ,  – действительные неконтролируемые и контролируемые внешние воздействия; – действительные неконтролируемые и контролируемые внешние воздействия;  , ,  – натурное управляющее воздействие на объект и воздействие оператора-технолога; – натурное управляющее воздействие на объект и воздействие оператора-технолога;  , ,  – выходные действительные и натурные (измеренные); – выходные действительные и натурные (измеренные);  – натурные сигналы состояния технологического объекта; – натурные сигналы состояния технологического объекта;  – консолидирующий вектор – консолидирующий вектор  переменных объекта; переменных объекта;  – i-ый алгоритм управления, используемый в момент t; – i-ый алгоритм управления, используемый в момент t;  – ситуация в системе в момент t. – ситуация в системе в момент t.
Корректно говорить о системах управления с переменной структурой (СПС) [7,8], алгоритмы и технологические участки которых изменяется (переключается) в зависимости от ситуации.
Заключение
Предложен новый подход доменной идентификации сложного нестационарного многорежимного объекта, основанный на распознавании ситуаций в системе управления и (или) окружающей среде, который не входит в противоречия с существующими методами и техниками идентификации. Предложенный подход дополняет известные разработки для конкретных ситуаций, когда свойства объекта автоматизированного управления меняются со временем или по внешним факторам. Приведена концепция объекта управления с изменяющимся поведением (модель объекта состоит из множества заранее не известных поведенческих моделей). Предложена структура системы управления, с изменяющимся поведением объекта. Результаты моделирования позволяют положительно оценивать целесообразность идентификации сложных многорежимных объектов на основе распознавания ситуаций в системе управления.
Задача распознавания ситуаций в системе управления в процессе ее функционирования состоит в выявлении типа (или типов) с которым связаны обнаруженные существенные изменения поведения объекта управления и в выборе определяющих факторов.
Задача идентификации действующего объекта управления для конкретной ситуации может решаться путем:
1) Проведения активного эксперимента, при условии невмешательства оператора –технолога (то есть путем нанесения и фиксации реакции объекта в окрестности его работы) [4].
2) Применении тестовых воздействий, при условии выполнении оператором-технологом своих текущих функций, а также прогнозирования им предстоящих управляющих воздействий [5,6].
References
1. Grop D. Metody identifikatsii sistem / D. Grop. M.: Mir, 1979.304 s.
2. Deich A.M. Metody identifikatsii dinamicheskikh ob''ektov / A.M. Deich. M.: Energiya, 1974. 240 s.
3. Ignat'ev A.A. Osnovy teorii identifikatsii dinamicheskikh ob''ektov: ucheb. posobie / A.A. Ignat'ev. Saratov: Sarat. gos. tekhn. un-t, 1999. 60 s.
4. Rotach V.Ya. Teoriya avtomaticheskogo upravleniya. Uchebnik dlya vuzov. — 2-e izd., pererab i dop. — M.: Izdatel'stvo MEI, 2004. — 400 s.
5. Avdeev V.P. Postroenie modelei v sistemakh upravleniya.-Izvestiya vuz. Chernaya metallugiya, 1981, №12, s. 100-105.
6. Verevkin V.I. i dr. Nanesenie eksperimental'nykh vozdeistvii na prognoziruemye rabochie upravleniya /V.I Verevkin, V.P. Avdeev, A.V. Lakuntsov, B.A. Burdonov, A.P. Katrich //Izv. vuzov. Cher. metallurgiya.-1975.-№6.-S. 163-166.-Bibliogr.: 5 nazv.
7. Emel'yanov S.V., Korovin S.K. Novye tipy obratnoi svyazi: Upravlenie pri neopredelennosti. — M.: Nauka. Fizmatlit, 1997. — 352 s. — ISBN5-02-015149-1.
8. Dobrynin A.S., Kulakov S.M., Purgina M.V., Koinov R.S. O primenenii grafovykh modelei v sistemakh avtomatizatsii slozhnykh nestatsionarnykh tekhnologicheskikh ob''ektov // Kibernetika i programmirovanie. — 2018.-№ 3.-S.63-71. DOI: 10.25136/2306-4196.2018.3.26400. URL: http://e-notabene.ru/kp/article_26400.html
Link to this article
You can simply select and copy link from below text field.
|
|





